Worm-type linear drive principle
Research Prof. Dr.-Ing. Detlef Riemer
Patent number: DE 19853324 A1
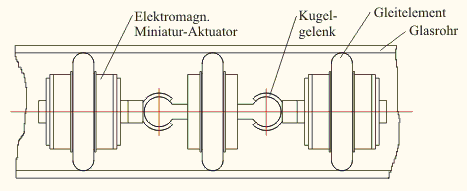
This drive system consists of motion-generating (active) linear actuators and associated passive elements to be moved. The basic principle is based on the utilisation of the temporally offset friction difference between temporarily stationary and moving members with the aim of generating a linear or rotational movement with or through the drive system.

The design can be modified so that the decouplable / utilisable movement is either performed by the drive system on a surface or that a slider / cage is moved by the drive system. An increase or modification of the frictional and adhesive forces between the driving and driven elements is possible, for example, via switchable friction surfaces, a change in the weight forces, with the help of a vacuum in corresponding suction arrangements, via permanent magnetic arrangements, electrostatic forces or also with the help of controlled magnetic fields.
Linear actuators or drives that can realise a linear movement as an output variable are used as drive elements. The linear movement can be generated directly or indirectly. Electromagnetic / electrostatic actuators, pneumatic / hydraulic actuators, piezo actuators, (electro)chemical motion transducers and thermomechanical drives can be used as motion-generating transducers.
If the stroke or the movement range of the movement-generating elements and/or the adhesive and frictional forces between the movement surface and the moving elements can be adjusted, it is possible to increase the movement resolution (fine positioning) and reduce the step width of the drive. It is also possible to change the step width by modifying the speed of movement of the drive elements by specifically overcoming the adhesive forces acting between the friction surfaces that are in contact with each other.
It is possible to move the drive system or the elements to be driven (slider) in both positive and negative coordinate or rotation directions. The reversal of motion can be realised by inverting the motion sequences. Theoretically, an unlimited range of movement can be achieved.

Possible applications
Tasks for inspection (measuring, observing, monitoring, scanning) and manipulation (processing, cleaning, labelling, drawing, plotting) on or of surfaces of different material composition and geometry (e.g. blood vessels, general cavities or cavity-like body structures in biology / medicine, curved surfaces, glass panes, pipes, floors, walls, ceilings, etc.)
The surface of the friction bodies can be designed in such a way that cleaning tasks, for example, are performed during the movement (e.g. by bristles on the surface)
measuring devices or activatable manipulators can be integrated into or attached to the friction bodies or externally
for educational purposes and as a technical toy for learning to understand logical mechanical and control engineering relationships, and
for use as an entertaining technical structure (e.g. for advertising purposes)