Wurmartiges Linearantriebsprinzip
Forschung Prof. Dr.-Ing. Detlef Riemer
Patentnummer: DE 19853324 A1
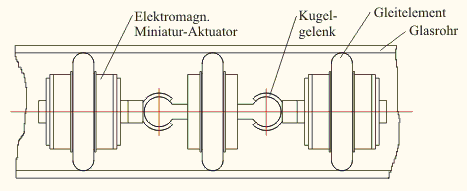
Dieses Antriebssystem besteht aus bewegungserzeugenden (aktiven) Linearaktuatoren und damit verbundenen, zu bewegenden passiven Elementen. Das Grundprinzip beruht auf dem Nutzen der zeitlich versetzt wirkenden Reibungsdifferenz zwischen temporär unbewegten und bewegten Gliedern mit dem Ziel, eine Linear- oder Rotationsbewegung mit oder durch das Antriebssystem zu generieren.

Der Aufbau kann so modifiziert werden, dass die auskoppelbare / nutzbare Bewegung entweder von der Antriebsordnung auf einer Oberfläche durchgeführt oder das ein Läufer / Käfig durch das Antriebssystem bewegt wird. Eine Vergrößerung bzw. Modifizierung der Reib- sowie Haftkräfte zwischen antreibenden und angetriebenen Elementen ist z.B. über zuschaltbare Reibflächen, eine Veränderung der Gewichtskräfte, mit Hilfe eines Unterdrucks in entsprechenden Sauganordnungen, über permanentmagnetische Anordnungen, elektrostatische Kräfte oder auch mit Hilfe gesteuerter magnetischer Felder möglich.
Als Antriebelemente finden Linearaktoren bzw. Antriebe, welche eine Linearbewegung als Ausgangsgröße realisieren können, Anwendung. Die Erzeugung der Linearbewegung kann direkt oder indirekt erfolgen. Als bewegungserzeugende Wandler können beispielsweise elektromagnetische / elektrostatische Aktoren, pneumatische / hydraulische Stellelemente, Piezoaktoren, (elektro-) chemische Bewegungswandler, thermomechanische Antriebe dienen.
Sind der Hub bzw. der Bewegungsbereich der bewegungserzeugenden Elemente oder / und die Haft- und Reibungskräfte zwischen Bewegungsoberfläche und bewegten Elementen einstellbar, ist eine Vergrößerung der Bewegungsauflösung (Feinpositionierung) sowie eine Verkleinerung der Schrittweite des Antriebs realisierbar. Eine Veränderung der Schrittweite ist auch mittels einer Modifizierung der Bewegungsgeschwindigkeit der Antriebsglieder, durch ein gezieltes überwinden von wirkenden Haftkräften zwischen den sich gegenseitig berührenden Reibungsoberflächen möglich.
Eine Bewegung des Antriebssystems bzw. der zu treibenden Elemente (Läufer) ist in positiver als auch in negativer Koordinaten- bzw. Rotationsrichtung möglich. Die Bewegungsumkehr ist durch eine Invertierung der Bewegungsabläufe realisierbar. Es kann theoretisch ein unbegrenzter Bewegungsbereich erreicht werden.

Anwendungsmöglichkeiten
Aufgaben zur Inspektion (Vermessen, Beobachten, Überwachen, Scannen) und Manipulation (Bearbeiten, Reinigen, Kennzeichnen, Zeichnen, Plotten) auf bzw. von Oberflächen unterschiedlicher Werkstoffzusammensetzung und Geometrie (wie z.B. Blutgefäße, allgemeine Hohlräume oder hohlraumartige Körpergebilde in Biologie / Medizin, gekrümmte Flächen, Glasscheiben, Rohre, Fußböden, Wänden, Decken u.ä.)
dabei kann die Oberfläche der Reibkörper so ausgebildet sein, dass während der Bewegung bereits z.B. Reinigungsaufgaben übernommen werden (z.B. durch Borsten auf der Oberfläche)
in bzw. an die Reibkörper können Messanordnung oder aktivierbare Manipulatoren integriert bzw. extern angebracht sein
für Ausbildungszwecke und als technisches Spielzeug zum verstehenden Lernen logischer mechanischer und steuerungstechnischer Zusammenhänge, sowie
zum Einsatz als unterhaltsames technisches Gebilde (z.B. für Werbezwecke)