Betreuung von Projekten
➤ Lernende Systeme
➤ Simulationstechnik
➤ Simulation mechatronischer Systeme
➤ Robotersteuerung und Robotersysteme
➤ Maschinelles Lernen und naturinspirierte Problemlösung
➤ Mechatronik-Projekt

Institut
MSR | Institut für Mess-, Steuerungs- und Regelungstechnik
Team
Professur Systemtheorie und Mechatronik | Prof. Dr.-Ing. Jens Jäkel
Publikationen ResearchGate ↗ | GoogleScholar ↗
Telefon +49 (0)341 3076 1261
E-mail senden | felix(dot)weiske(at)htwk-leipzig.de
HTWK Leipzig | Fakultät Ingenieurwissenschaften
Wiener-Bau | Raum WI310
Wächterstraße 13, 04107 Leipzig

➤ Lernende Systeme
➤ Simulationstechnik
➤ Simulation mechatronischer Systeme
➤ Robotersteuerung und Robotersysteme
➤ Maschinelles Lernen und naturinspirierte Problemlösung
➤ Mechatronik-Projekt

➤ Exoskelettale Bewegungsunterstützungssysteme
➤ Safe Reinforcement Learning
➤ aktuelles Promotionsvorhaben: Regelung aktiver Bewegungsunterstützungssysteme durch sicheres, modellbasiertes Reinforcement Learning

Durch die demografische Entwicklung Deutschlands entsteht ein besonderer Bedarf an altersgerechter Gestaltung des Wohnumfeldes durch technische Lösungen. Das sichere, intelligente Bewegungsunterstützungssystem (siBUS) ist zu diesem Zweck im Rahmen aktueller und vorhergehender FuE-Projekte entwickelt worden. Es hilft Senioren in häuslicher Umgebung bei der Überwindung von Treppen. Im Rahmen der SAB-Validierungsförderung soll es nun validiert und für einen Markttransfer vorbereitet werden.
Projektlaufzeit: 04/2021 – 09/2022

Automatisierungssysteme für verfahrenstechnische Anlagen werden immer komplexer, müssen immer höhere Anforderungen an Qualität und Sicherheit gewährleisten und unterliegen einem globalen dynamischen Wettbewerb. Zur Beherrschung der steigenden Anforderungen hat sich im Zuge der industriellen Digitalisierung und der zunehmenden Vernetzung von Anlagen das Konzept des Digitalen Zwillings als digitales Abbild der realen Anlage etabliert. Die Notwendigkeit des digitalen Wandels ist auch im Bereich der Verdichter- und Turbinenanlagen wahrzunehmen.
Förderung: Zentrales Innovationsprogramm Mittelstand
Projektlaufzeit: 1/2020 - 2/2022

Ziel: Die Konzeption der weiteren Entwicklung des Bewegungsunterstützungssystems soll im Gespräch mit der Öffentlichkeit entstehen, um so partizipativ zu entwickeln. Ausstellungen sollen als Raum zum unvoreingenommenen Kennenlernen, Ausprobieren, Diskutieren und Meinung bilden dienen, wobei zusätzlich ein Verständnisaufbau über KI erfolgen soll.
Ergebnisse: Ausstellungen des ersten Demonstrators des Bewegungsunterstützungssystems in Köln, Leipzig, Berlin und Essen; wichtiges Feedback von Senioren für die Weiterentwicklung des Bewegungsunterstützungssystems
Förderung: Wissenschaft im Dialog gGmbH
Projektlaufzeit: 01.03.2019 - 31.12.2020
Projektleiter: M. Eng. Max Böhme
Projektbearbeiter: M. Eng. Max Böhme, M. Sc. Felix Weiske
Weitere Infos auf Hochschulwettbewerb 2019 ↗
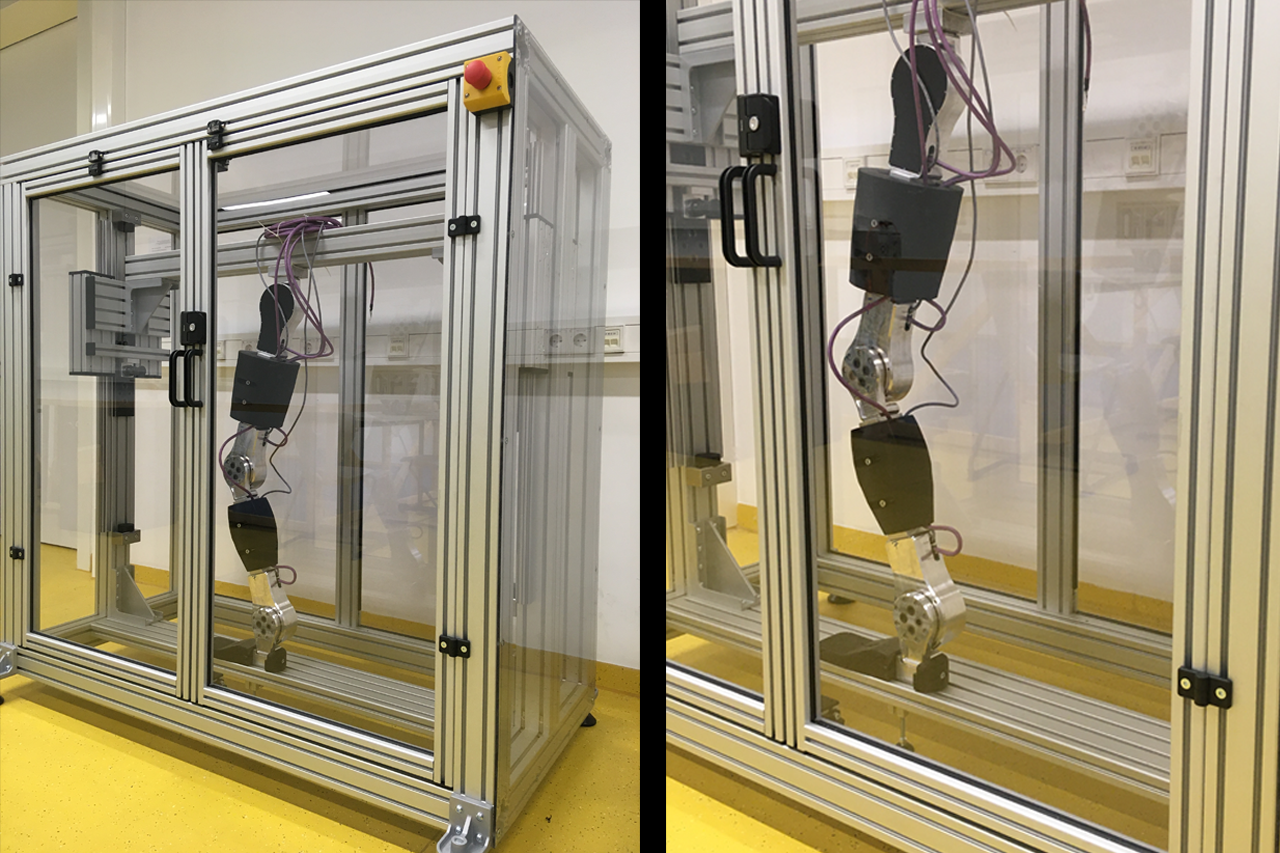
Ziel: Entwicklung eines interdisziplinären Konzepts zur funktionellen Verifikation von Bewegungsunterstützungssystemen sowie konstruktive Umsetzung und Aufbau des Konzeptes.
Ergebnisse: Aufbau und Konstruktion eines „mechatronischen Beins“ als Prüfstand
Förderung: Sächsische Aufbaubank (SAB), Sächsisches Ministerium für Wissenschaft und Kunst (SMWK)
Projektlaufzeit: 01.08.2019 - 31.12.2019
Projektleiter: Prof. Dr.-Ing. Jens Jäkel, Prof. Dr.-Ing. Johannes Zentner
Projektbearbeiter: M. Eng. Max Böhme, M. Sc. Felix Weiske

Ziel: Im Projekt sollen exoskelettale Bewegungsunterstützungssysteme partizipativ entwickelt werden, welche Senioren beim Bewältigen alltäglicher Hürden, wie dem Treppensteigen, helfen. Durch Ermittlung des biomechanischen Unterstützungsbedarfes und der simulationsgestützten Konzeptuntersuchung sollen erste Demonstratoren aufgebaut werden.
Ergebnisse: Subjektive Anforderungen und Wünsche an ein derartiges exoskelettales Bewegungsunterstützungssystem (Konferenzbeitrag „Praktische Bedarfsanalyse“); Ermittelter biomechanischer Unterstützungsbedarf von Senioren bei der Überwindung von Treppen (in Kooperation mit der Universität Leipzig, Abteilung Biomechanik); Konstruktion und Aufbau eines ersten Demonstrators für ein Bein
Förderung: Europäischer Sozialfond (ESF)
Projektlaufzeit: 01.10.2016 - 31.07.2019
Projektleiter: Prof. Dr.-Ing. Jens Jäkel, Prof. Dr.-Ing. Johannes Zentner
Projektbearbeiter: M. Eng. Max Böhme, M. Sc. Felix Weiske

")